|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
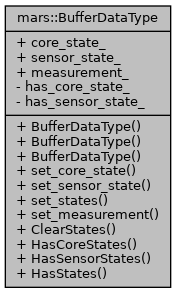
The BufferDataType binds the core and sensor state in form of a shared void pointer. More...
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/type_definitions/buffer_data_type.h>
 Collaboration diagram for mars::BufferDataType:
Collaboration diagram for mars::BufferDataType:Public Member Functions | |
| BufferDataType ()=default | |
| BufferDataType (std::shared_ptr< void > meas) | |
| BufferDataType. | |
| BufferDataType (std::shared_ptr< void > core, std::shared_ptr< void > sensor) | |
| void | set_core_state (std::shared_ptr< void > core) |
| void | set_sensor_state (std::shared_ptr< void > sensor) |
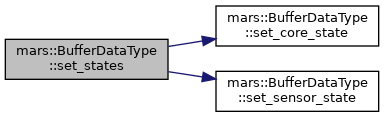
| void | set_states (std::shared_ptr< void > core, std::shared_ptr< void > sensor) |
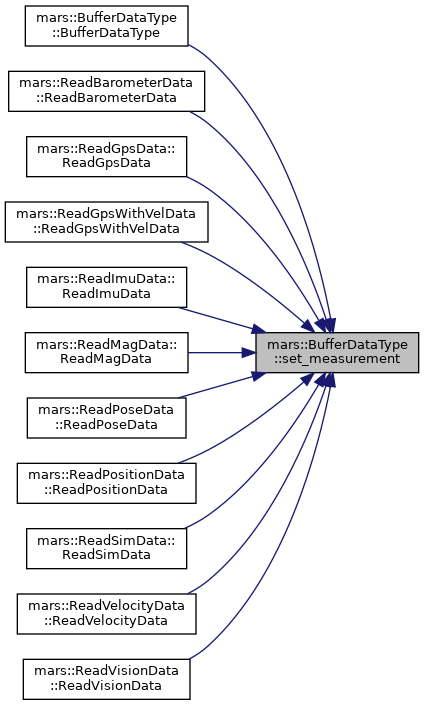
| void | set_measurement (std::shared_ptr< void > meas) |
| void | ClearStates (void) |
| bool | HasCoreStates (void) const |
| bool | HasSensorStates (void) const |
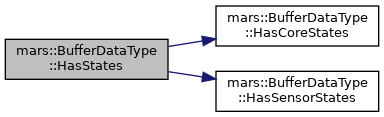
| bool | HasStates (void) const |
Public Attributes | |
| std::shared_ptr< void > | core_state_ { nullptr } |
| Core state data. | |
| std::shared_ptr< void > | sensor_state_ { nullptr } |
| Sensor state data. | |
| std::shared_ptr< void > | measurement_ { nullptr } |
| Sensor measurement. | |
Private Attributes | |
| bool | has_core_state_ = { false } |
| bool | has_sensor_state_ = { false } |
The BufferDataType binds the core and sensor state in form of a shared void pointer.
This shared pointer is of type void to allow generalized storage of different sensor and core data types. The need for the versatility of data types is caused by the fact that sensor measurements can not be stored with a common base class since the input and output parameter differ for each class. A high-level class such as the PoseSensorClass needs to keep track of the type such that it can cast the data before it is used.
An entry always contains a measurement, if has_state is true, then the entry also has a core state. Not all entrys have sensor states.
|
default |
|
inline |
| core | this data field holds the core state data |
| sensor | this data field holds the sensor state or measurement data |
Here is the call graph for this function:
|
inline |
Here is the call graph for this function:
|
inline |
Here is the caller graph for this function:
|
inline |
Here is the caller graph for this function:
|
inline |
Here is the call graph for this function: Here is the caller graph for this function:
|
inline |
Here is the caller graph for this function:
|
inline |
|
inline |
|
inline |
|
inline |
Here is the call graph for this function:| std::shared_ptr<void> mars::BufferDataType::core_state_ { nullptr } |
Core state data.
| std::shared_ptr<void> mars::BufferDataType::sensor_state_ { nullptr } |
Sensor state data.
| std::shared_ptr<void> mars::BufferDataType::measurement_ { nullptr } |
Sensor measurement.
|
private |
|
private |