#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/ekf.h>
|
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | Ekf (const Eigen::Ref< const Eigen::MatrixXd > &H, const Eigen::Ref< const Eigen::MatrixXd > &R, const Eigen::Ref< const Eigen::MatrixXd > &res, const Eigen::Ref< const Eigen::MatrixXd > &P) |
| | Ekf Essential EFK update component.
|
| |
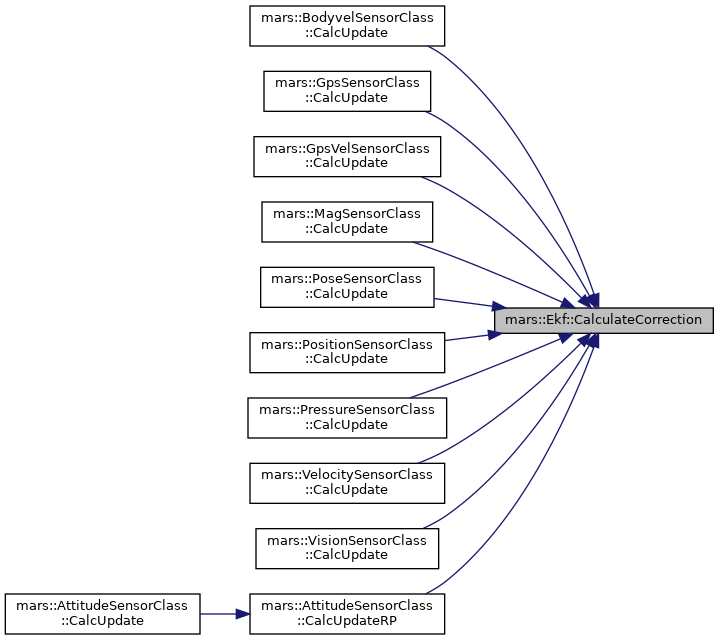
| Eigen::MatrixXd | CalculateCorrection () |
| | Kalman gain.
|
| |
| Eigen::MatrixXd | CalculateCorrection (Chi2 *chi2) |
| | CalculateCorrection Calculating the state correction with a post Chi2 test.
|
| |
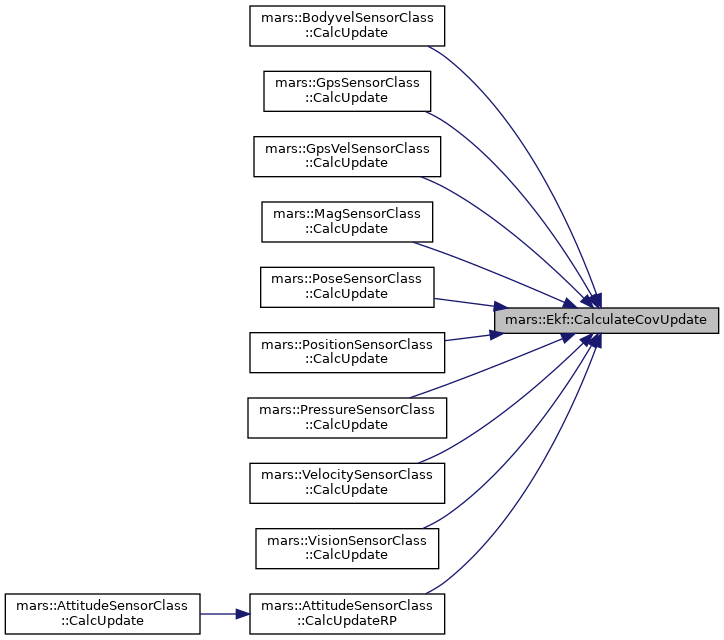
| Eigen::MatrixXd | CalculateCovUpdate () |
| | CalculateCovUpdate Updating the state covariance after the state update.
|
| |
|
| Eigen::MatrixXd | H_ |
| |
| Eigen::MatrixXd | R_ |
| | Jacobian.
|
| |
| Eigen::MatrixXd | res_ |
| | Measurement noise.
|
| |
| Eigen::MatrixXd | P_ |
| | Residual.
|
| |
| Eigen::MatrixXd | S_ |
| | State covariance.
|
| |
| Eigen::MatrixXd | K_ |
| | Innovation / variance of the residual.
|
| |
|
| Eigen::MatrixXd | CalculateStateCorrection () |
| | CalculateStateCorrection Calculation of EKF components, correction, innovation etc.
|
| |
◆ Ekf()
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW mars::Ekf::Ekf |
( |
const Eigen::Ref< const Eigen::MatrixXd > & |
H, |
|
|
const Eigen::Ref< const Eigen::MatrixXd > & |
R, |
|
|
const Eigen::Ref< const Eigen::MatrixXd > & |
res, |
|
|
const Eigen::Ref< const Eigen::MatrixXd > & |
P |
|
) |
| |
|
inline |
Ekf Essential EFK update component.
- Parameters
-
| H | Jacobian |
| R | Measurement noise |
| res | Residual |
| P | State covariance |
105 {
110 }
Eigen::MatrixXd H_
Definition ekf.h:112
Eigen::MatrixXd res_
Measurement noise.
Definition ekf.h:114
Eigen::MatrixXd P_
Residual.
Definition ekf.h:115
Eigen::MatrixXd R_
Jacobian.
Definition ekf.h:113
◆ CalculateCorrection() [1/2]
| Eigen::MatrixXd mars::Ekf::CalculateCorrection |
( |
| ) |
|
Kalman gain.
CalculateCorrection Calculating the state correction without a post Chi2 test
- Returns
◆ CalculateCorrection() [2/2]
| Eigen::MatrixXd mars::Ekf::CalculateCorrection |
( |
Chi2 * |
chi2 | ) |
|
CalculateCorrection Calculating the state correction with a post Chi2 test.
- Parameters
-
| chi2 | 'Chi2' class based on the sensor measurement |
- Returns
◆ CalculateCovUpdate()
| Eigen::MatrixXd mars::Ekf::CalculateCovUpdate |
( |
| ) |
|
CalculateCovUpdate Updating the state covariance after the state update.
- Returns
- Updated state covariance matrix
◆ CalculateStateCorrection()
| Eigen::MatrixXd mars::Ekf::CalculateStateCorrection |
( |
| ) |
|
|
private |
CalculateStateCorrection Calculation of EKF components, correction, innovation etc.
- Returns
- State correction vector
◆ H_
| Eigen::MatrixXd mars::Ekf::H_ |
◆ R_
| Eigen::MatrixXd mars::Ekf::R_ |
◆ res_
| Eigen::MatrixXd mars::Ekf::res_ |
◆ P_
| Eigen::MatrixXd mars::Ekf::P_ |
◆ S_
| Eigen::MatrixXd mars::Ekf::S_ |
◆ K_
| Eigen::MatrixXd mars::Ekf::K_ |
Innovation / variance of the residual.
The documentation for this class was generated from the following file:
 Collaboration diagram for mars::Ekf:
Collaboration diagram for mars::Ekf: