|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/general_functions/utils.h>
 Collaboration diagram for mars::Utils:
Collaboration diagram for mars::Utils:Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | Utils () |
Static Public Member Functions | |
| static std::string | get_mars_version_string () |
| get_mars_version_string | |
| static void | PrintMarsVersion () |
| PrintMarsVersion. | |
| static void | TransformImu (const mars::IMUMeasurementType &prev, const mars::IMUMeasurementType &now, const double &dt, const Eigen::Vector3d &p_ab, const Eigen::Quaterniond &q_ab, mars::IMUMeasurementType &result) |
| TransformImu Transform IMU measurements from current frame A to frame B. | |
| static void | TransformImu (const mars::IMUMeasurementType &now, const Eigen::Vector3d &p_ab, const Eigen::Quaterniond &q_ab, mars::IMUMeasurementType &result) |
| TransformImu Transform IMU measurements from current frame A to frame B. | |
| static Eigen::Matrix3d | Skew (const Eigen::Vector3d &v) |
| skew generate the skew symmetric matrix of v | |
| static Eigen::Matrix4d | MatExp (const Eigen::Matrix4d &A, const int &order=4) |
| mat_exp Calculation of the matrix exponential, Taylor series cut-off at specified order | |
| static Eigen::Matrix4d | OmegaMat (const Eigen::Vector3d &v) |
| omega_mat ight multiplication | |
| static Eigen::Quaterniond | QuatFromSmallAngle (const Eigen::Vector3d &d_theta_vec) |
| QuatFromSmallAngle. | |
| static Eigen::Quaterniond | ApplySmallAngleQuatCorr (const Eigen::Quaterniond &q_prior, const Eigen::Vector3d &correction) |
| ApplySmallAngleQuatCorr. | |
| static Eigen::Vector3d | RPYFromRotMat (const Eigen::Matrix3d &rot_mat) |
| RPYFromRotMat derives the roll pitch and yaw angle from a rotation matrix (in that order) | |
| static bool | CheckCov (const Eigen::MatrixXd &cov_mat, const std::string &description, const bool &check_cond=false) |
| check_cov Performs tests for the properties of a given covariance matrix | |
| static Eigen::MatrixXd | EnforceMatrixSymmetry (const Eigen::Ref< const Eigen::MatrixXd > &mat_in) |
| EnforceMatrixSymmetry. | |
| static Eigen::Quaterniond | quaternionAverage (const std::vector< Eigen::Quaterniond > &quats) |
| quaternionAverage without weights | |
| template<typename T , typename A > | |
| static std::vector< T > | VecExtractEveryNthElm (std::vector< T, A > const &data, const int &nth) |
| VecExtractEveryNthElm Takes a vector and returns a new vector which only contains every n'th element. | |
| static Eigen::Quaterniond | NormalizeQuaternion (const Eigen::Quaterniond &quat, std::string note="") |
| static Eigen::Quaterniond | NormalizeQuaternion (const double &w, const double &x, const double &y, const double &z, std::string note="") |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW mars::Utils::Utils | ( | ) |
|
static |
get_mars_version_string
|
static |
PrintMarsVersion.
|
static |
TransformImu Transform IMU measurements from current frame A to frame B.
This function takes angular accleration into account and thus needs the previous IMU measurement and dt
| prev | Previos IMU measurement expressed in frame A |
| now | Current IMU measurement expressed in frame A |
| dt | Delta time between both IMU measurements |
| p_ab | Transformation of frame B w.r.t. frame A |
| q_ab | Rotation of frame B w.r.t. frame A |
| result | Transformed current IMU measurement expressed in frame B |
|
static |
TransformImu Transform IMU measurements from current frame A to frame B.
This function does not take the angular accleration into account and thus does not need the previous IMU measurement and dt
| now | Current IMU measurement expressed in frame A |
| p_ab | Transformation of frame B w.r.t. frame A |
| q_ab | Rotation of frame B w.r.t. frame A |
| result | Transformed current IMU measurement expressed in frame B |
|
static |
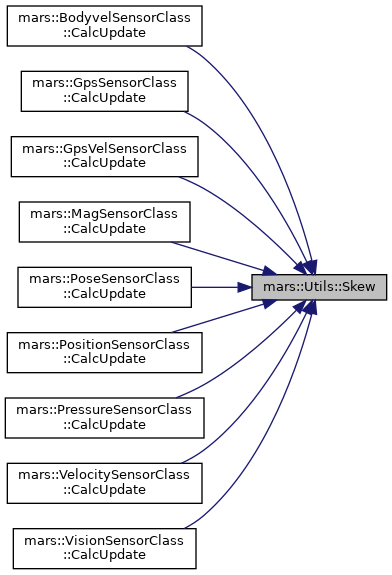
skew generate the skew symmetric matrix of v
| v | 3d vector |
Here is the caller graph for this function:
|
static |
mat_exp Calculation of the matrix exponential, Taylor series cut-off at specified order
| A | Matrix for Taylor series |
| order | Order at wich the series is cut-off |
|
static |
omega_mat ight multiplication
| v |
|
static |
QuatFromSmallAngle.
| d_theta_vec | angle for the generation of the quaternion |
|
static |
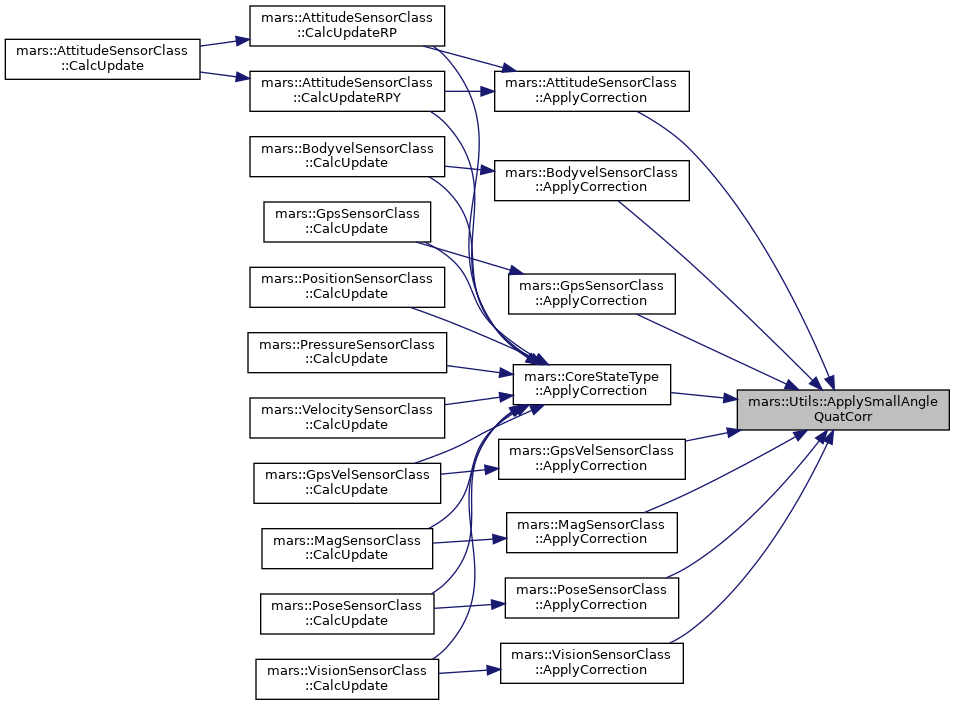
ApplySmallAngleQuatCorr.
| q_prior | |
| correction |
Here is the caller graph for this function:
|
static |
RPYFromRotMat derives the roll pitch and yaw angle from a rotation matrix (in that order)
| rot_mat | 3x3 rotation matrix |
Here is the caller graph for this function:
|
static |
check_cov Performs tests for the properties of a given covariance matrix
| cov_mat | |
| description | Used to associate the warning with the given covariance |
| check_cond | Check the condition number of the covariance matrix |
|
static |
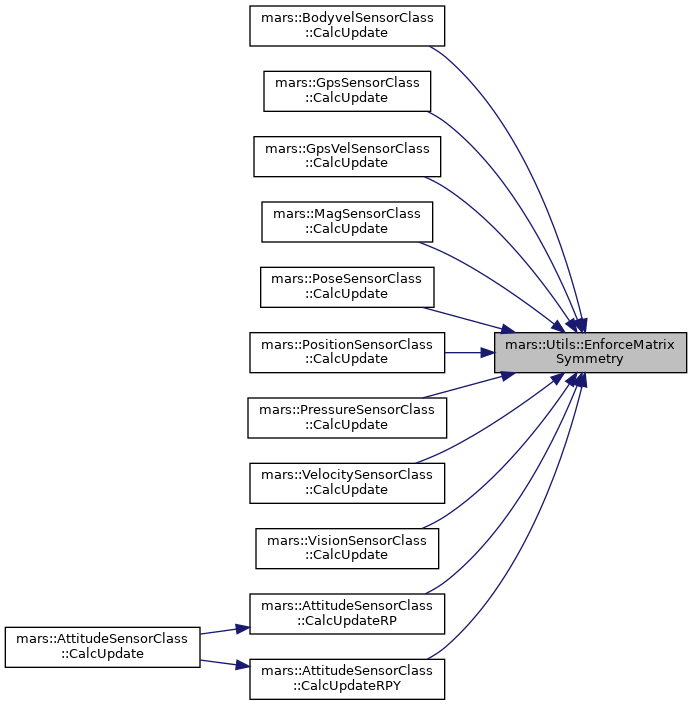
EnforceMatrixSymmetry.
| mat_in |
Here is the caller graph for this function:
|
static |
quaternionAverage without weights
| quats | vector of quaternion being averaged |
|
inlinestatic |
VecExtractEveryNthElm Takes a vector and returns a new vector which only contains every n'th element.
| data | Vector with a number of entries |
| nth | Defines the reduction of entries to only every n'th |
|
static |
Here is the caller graph for this function:
|
static |