|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
The BaseSensorData class binds the sensor state and covariance matrix. More...
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensors/bind_sensor_data.h>
 Collaboration diagram for mars::BindSensorData< T >:
Collaboration diagram for mars::BindSensorData< T >:Public Member Functions | |
| BindSensorData () | |
| void | set_cov (const Eigen::MatrixXd &cov) |
| set_cov Takes a full covariance and separates sensor covariance and sensor-core cross-correlation | |
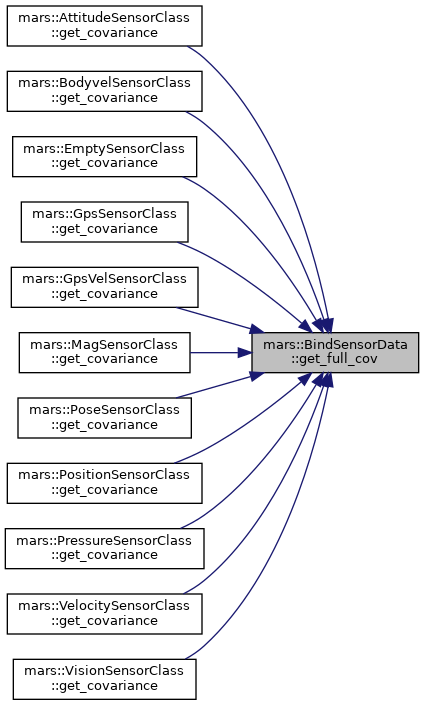
| Eigen::MatrixXd | get_full_cov () const |
| get_full_cov builds the full covariance matrix | |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW T | state_ |
| int | full_cov_size_ |
| size of the full covariance | |
| Eigen::MatrixXd | sensor_cov_ |
| covariance of the sensor states | |
| Eigen::MatrixXd | core_sensor_cross_cov_ |
| cross-correlation between sensor states and the core | |
The BaseSensorData class binds the sensor state and covariance matrix.
The state is instanciated with the passed template (sensor state type) The sensor state class needs to define the error state. The BaseSensorData class initializes the covariance matrix based on this value.
|
inline |
|
inline |
set_cov Takes a full covariance and separates sensor covariance and sensor-core cross-correlation
| cov |
|
inline |
get_full_cov builds the full covariance matrix
Here is the caller graph for this function:| EIGEN_MAKE_ALIGNED_OPERATOR_NEW T mars::BindSensorData< T >::state_ |
| int mars::BindSensorData< T >::full_cov_size_ |
size of the full covariance
| Eigen::MatrixXd mars::BindSensorData< T >::sensor_cov_ |
covariance of the sensor states
| Eigen::MatrixXd mars::BindSensorData< T >::core_sensor_cross_cov_ |
cross-correlation between sensor states and the core