|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/type_definitions/core_state_type.h>
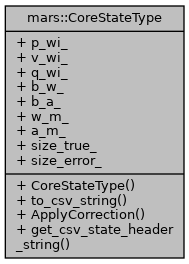
 Collaboration diagram for mars::CoreStateType:
Collaboration diagram for mars::CoreStateType:Public Member Functions | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | CoreStateType ()=default |
| std::string | to_csv_string (const double ×tamp) const |
| to_csv_string export state to single csv string | |
Static Public Member Functions | |
| static CoreStateType | ApplyCorrection (CoreStateType state_prior, Eigen::Matrix< double, CoreStateType::size_error_, 1 > correction) |
| ApplyCorrection. | |
| static std::string | get_csv_state_header_string () |
Public Attributes | |
| Eigen::Vector3d | p_wi_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d | v_wi_ { Eigen::Vector3d::Zero() } |
| Eigen::Quaternion< double > | q_wi_ { Eigen::Quaternion<double>::Identity() } |
| Eigen::Vector3d | b_w_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d | b_a_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d | w_m_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d | a_m_ { Eigen::Vector3d::Zero() } |
Static Public Attributes | |
| static constexpr int | size_true_ = 16 |
| static constexpr int | size_error_ = 15 |
Friends | |
| std::ostream & | operator<< (std::ostream &out, const CoreStateType &data) |
|
default |
|
inlinestatic |
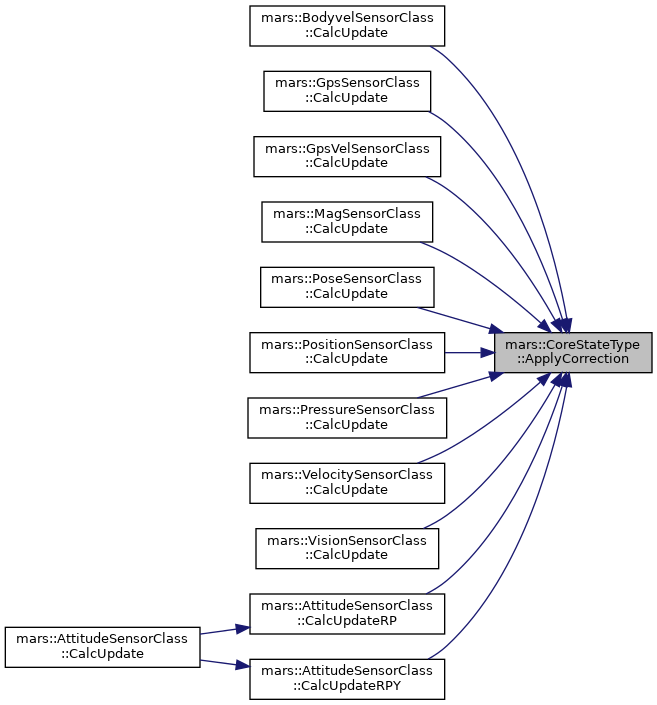
ApplyCorrection.
| state_prior | |
| correction | order [p_wi(0:2), v_wi(3:5), q_wi(6:8), b_w(9:11), b_a(12:14)] |
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
|
inline |
to_csv_string export state to single csv string
| timestamp |
|
friend |
| Eigen::Vector3d mars::CoreStateType::p_wi_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d mars::CoreStateType::v_wi_ { Eigen::Vector3d::Zero() } |
| Eigen::Quaternion<double> mars::CoreStateType::q_wi_ { Eigen::Quaternion<double>::Identity() } |
| Eigen::Vector3d mars::CoreStateType::b_w_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d mars::CoreStateType::b_a_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d mars::CoreStateType::w_m_ { Eigen::Vector3d::Zero() } |
| Eigen::Vector3d mars::CoreStateType::a_m_ { Eigen::Vector3d::Zero() } |
|
staticconstexpr |
|
staticconstexpr |