#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensor_manager.h>
◆ SensorManager()
| mars::SensorManager::SensorManager |
( |
| ) |
|
|
default |
◆ register_sensor()
| bool mars::SensorManager::register_sensor |
( |
std::shared_ptr< SensorAbsClass > |
sensor | ) |
|
|
inline |
register_sensor Register a sensor with the sensor manager
- Parameters
-
| sensor | Sensor to be registered |
- Returns
- True if the sensor was registered, false if the sensor is already registered
33 {
34
36 {
37
38 return false;
39 }
40
42 std::cout << "Registered sensor [" << sensor->name_ << "] with Sensor Manager" << std::endl;
43 return true;
44 }
std::vector< std::shared_ptr< SensorAbsClass > > sensor_list_
Vector containing all registered sensors.
Definition sensor_manager.h:24
◆ remove_sensor()
| bool mars::SensorManager::remove_sensor |
( |
Buffer & |
buffer, |
|
|
std::shared_ptr< SensorAbsClass > |
sensor |
|
) |
| |
|
inline |
remove_sensor Remove a sensor from the sensor manager
- Parameters
-
| buffer | Buffer to remove the sensor from |
| sensor | Sensor to be removed |
- Returns
- True if the sensor was removed, false if the sensor is not registered
53 {
55 {
56
57 return false;
58 }
59
61
63 std::cout << "Removed sensor [" << sensor->name_ << "] from Sensor Manager" << std::endl;
64 return true;
65 }
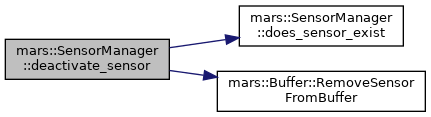
bool deactivate_sensor(Buffer &buffer, std::shared_ptr< SensorAbsClass > sensor)
deactivate_sensor Deactivate a sensor
Definition sensor_manager.h:99
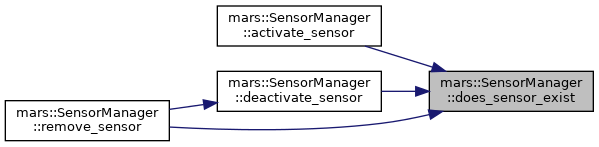
bool does_sensor_exist(std::shared_ptr< SensorAbsClass > sensor)
does_sensor_exist Check if a sensor is registered
Definition sensor_manager.h:84
◆ list_sensors()
| void mars::SensorManager::list_sensors |
( |
| ) |
|
|
inline |
list_sensors Print the information of all registered sensors
71 {
72 std::cout <<
"Sensor Manager contains " <<
sensor_list_.size() <<
" sensors" << std::endl;
74 {
75 std::cout << *sensor << std::endl;
76 }
77 }
◆ does_sensor_exist()
| bool mars::SensorManager::does_sensor_exist |
( |
std::shared_ptr< SensorAbsClass > |
sensor | ) |
|
|
inline |
does_sensor_exist Check if a sensor is registered
- Parameters
-
| sensor | Sensor to be checked |
- Returns
- True if the sensor is registered, otherwise false
85 {
87 {
88 return true;
89 }
90 return false;
91 }
◆ deactivate_sensor()
| bool mars::SensorManager::deactivate_sensor |
( |
Buffer & |
buffer, |
|
|
std::shared_ptr< SensorAbsClass > |
sensor |
|
) |
| |
|
inline |
deactivate_sensor Deactivate a sensor
- Parameters
-
| buffer | Buffer to remove the sensor from |
| sensor | Sensor to be deactivated |
- Returns
- False if the sensor is not registered, otherwise true
100 {
102 {
103
104 return false;
105 }
106
107
108 sensor->do_update_ = false;
109 sensor->is_initialized_ = false;
110 sensor->ref_to_nav_given_ = false;
111
112
113 if (buffer.RemoveSensorFromBuffer(sensor))
114 {
115 std::cout << "Removed sensor [" << sensor->name_ << "] from buffer" << std::endl;
116 }
117 else
118 {
119 std::cout << "Could not remove sensor [" << sensor->name_ << "] from buffer as buffer is empty" << std::endl;
120 return false;
121 }
122 return true;
123 }
◆ activate_sensor()
| bool mars::SensorManager::activate_sensor |
( |
std::shared_ptr< SensorAbsClass > |
sensor | ) |
|
|
inline |
activate_sensor Activate a sensor
- Parameters
-
| sensor | Sensor to be activated |
- Returns
- False if the sensor is not registered, otherwise true
131 {
133 {
134
135 return false;
136 }
137
138 sensor->do_update_ = true;
139 std::cout << "Activated sensor [" << sensor->name_ << "]" << std::endl;
140 return true;
141 }
◆ sensor_list_
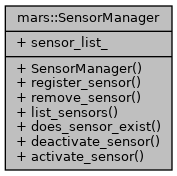
| std::vector<std::shared_ptr<SensorAbsClass> > mars::SensorManager::sensor_list_ |
Vector containing all registered sensors.
The documentation for this class was generated from the following file:
 Collaboration diagram for mars::SensorManager:
Collaboration diagram for mars::SensorManager: