|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensors/sensor_abs_class.h>
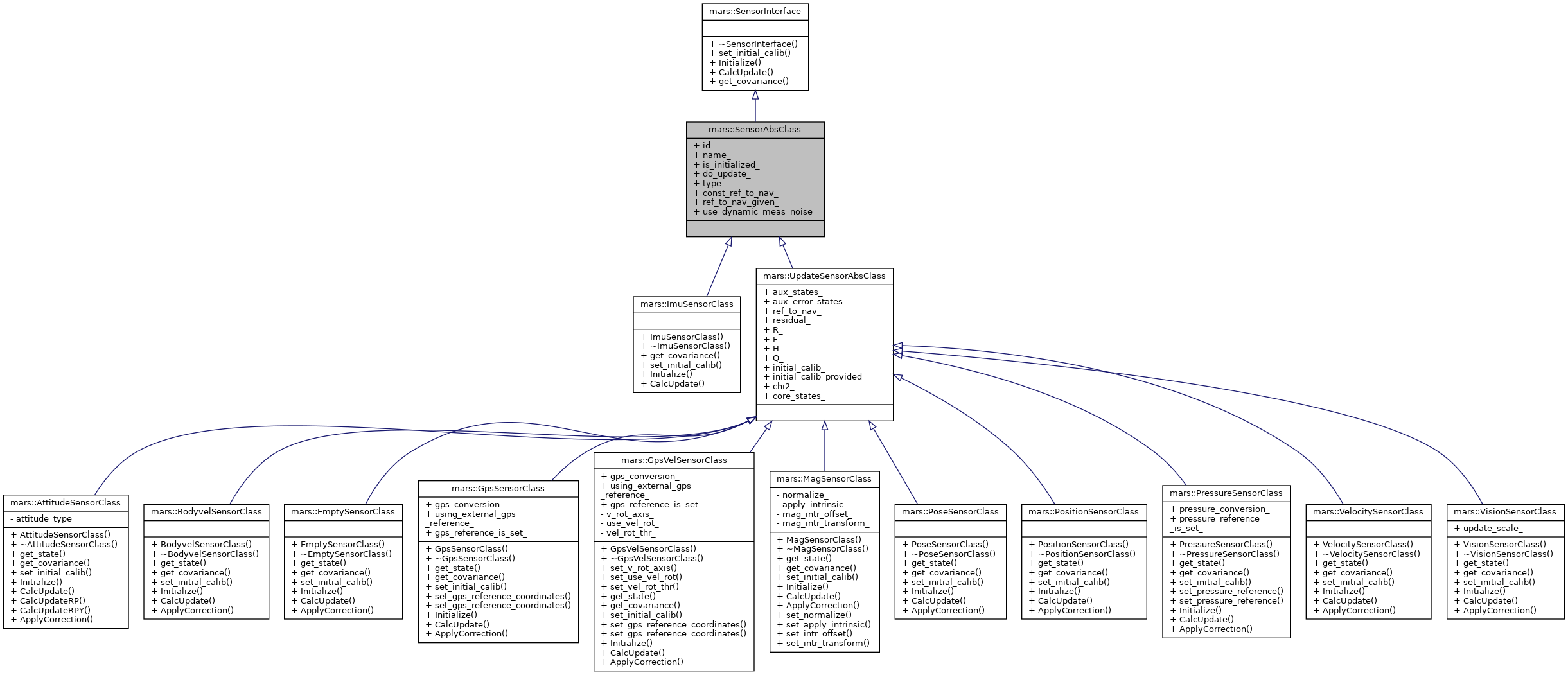
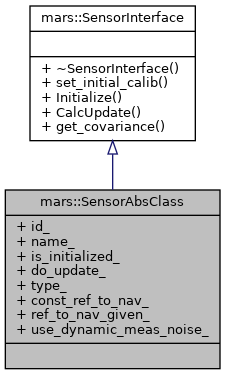
 Inheritance diagram for mars::SensorAbsClass: Collaboration diagram for mars::SensorAbsClass:
Inheritance diagram for mars::SensorAbsClass: Collaboration diagram for mars::SensorAbsClass:Public Attributes | |
| int | id_ { -1 } |
| std::string | name_ |
| Name of the individual sensor instance. | |
| bool | is_initialized_ { false } |
| True if the sensor has been initialized. | |
| bool | do_update_ { true } |
| True if updates should be performed with the sensor. | |
| int | type_ { -1 } |
| Future feature, holds information such as position or orientation for highlevel decissions. | |
| bool | const_ref_to_nav_ { true } |
| True if the reference should not be estimated. | |
| bool | ref_to_nav_given_ { false } |
| True if the reference to the navigation frame is given by initial calibration. | |
| bool | use_dynamic_meas_noise_ { false } |
| True if dynamic noise values from measurements should be used. | |
Friends | |
| std::ostream & | operator<< (std::ostream &out, const SensorAbsClass &sensor) |
| operator << Overload the << operator for easy printing of the sensor information | |
Additional Inherited Members | |
| Public Member Functions inherited from mars::SensorInterface | |
| virtual EIGEN_MAKE_ALIGNED_OPERATOR_NEW | ~SensorInterface ()=default |
| virtual void | set_initial_calib (std::shared_ptr< void > calibration)=0 |
| set_initial_calib Sets the calibration of an individual sensor | |
| virtual BufferDataType | Initialize (const Time ×tamp, std::shared_ptr< void > measurement, std::shared_ptr< CoreType > latest_core_data)=0 |
| Initialize the state of an individual sensor. | |
| virtual bool | CalcUpdate (const Time ×tamp, std::shared_ptr< void > measurement, const CoreStateType &prior_core_state_data, std::shared_ptr< void > latest_sensor_data, const Eigen::MatrixXd &prior_cov, BufferDataType *new_state_data)=0 |
| CalcUpdate Calculates the update for an individual sensor definition. | |
| virtual Eigen::MatrixXd | get_covariance (const std::shared_ptr< void > &sensor_data)=0 |
| get_covariance Resolves a void pointer to the covariance matrix of the corresponding sensor type Each sensor is responsible to cast its own data type | |
|
friend |
operator << Overload the << operator for easy printing of the sensor information
| int mars::SensorAbsClass::id_ { -1 } |
| std::string mars::SensorAbsClass::name_ |
Name of the individual sensor instance.
| bool mars::SensorAbsClass::is_initialized_ { false } |
True if the sensor has been initialized.
| bool mars::SensorAbsClass::do_update_ { true } |
True if updates should be performed with the sensor.
| int mars::SensorAbsClass::type_ { -1 } |
Future feature, holds information such as position or orientation for highlevel decissions.
| bool mars::SensorAbsClass::const_ref_to_nav_ { true } |
True if the reference should not be estimated.
| bool mars::SensorAbsClass::ref_to_nav_given_ { false } |
True if the reference to the navigation frame is given by initial calibration.
| bool mars::SensorAbsClass::use_dynamic_meas_noise_ { false } |
True if dynamic noise values from measurements should be used.