#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensors/sensor_interface.h>
|
| virtual EIGEN_MAKE_ALIGNED_OPERATOR_NEW | ~SensorInterface ()=default |
| |
| virtual void | set_initial_calib (std::shared_ptr< void > calibration)=0 |
| | set_initial_calib Sets the calibration of an individual sensor
|
| |
| virtual BufferDataType | Initialize (const Time ×tamp, std::shared_ptr< void > measurement, std::shared_ptr< CoreType > latest_core_data)=0 |
| | Initialize the state of an individual sensor.
|
| |
| virtual bool | CalcUpdate (const Time ×tamp, std::shared_ptr< void > measurement, const CoreStateType &prior_core_state_data, std::shared_ptr< void > latest_sensor_data, const Eigen::MatrixXd &prior_cov, BufferDataType *new_state_data)=0 |
| | CalcUpdate Calculates the update for an individual sensor definition.
|
| |
| virtual Eigen::MatrixXd | get_covariance (const std::shared_ptr< void > &sensor_data)=0 |
| | get_covariance Resolves a void pointer to the covariance matrix of the corresponding sensor type Each sensor is responsible to cast its own data type
|
| |
◆ ~SensorInterface()
| virtual EIGEN_MAKE_ALIGNED_OPERATOR_NEW mars::SensorInterface::~SensorInterface |
( |
| ) |
|
|
virtualdefault |
◆ set_initial_calib()
| virtual void mars::SensorInterface::set_initial_calib |
( |
std::shared_ptr< void > |
calibration | ) |
|
|
pure virtual |
set_initial_calib Sets the calibration of an individual sensor
- Parameters
-
Implemented in mars::AttitudeSensorClass, mars::BodyvelSensorClass, mars::EmptySensorClass, mars::GpsSensorClass, mars::GpsVelSensorClass, mars::MagSensorClass, mars::PoseSensorClass, mars::PositionSensorClass, mars::PressureSensorClass, mars::VelocitySensorClass, mars::VisionSensorClass, and mars::ImuSensorClass.
◆ Initialize()
| virtual BufferDataType mars::SensorInterface::Initialize |
( |
const Time & |
timestamp, |
|
|
std::shared_ptr< void > |
measurement, |
|
|
std::shared_ptr< CoreType > |
latest_core_data |
|
) |
| |
|
pure virtual |
Initialize the state of an individual sensor.
- Parameters
-
| timestamp | current timestamp |
| measurement | current sensor measurement |
| latest_core_data | |
- Returns
Implemented in mars::ImuSensorClass, mars::GpsSensorClass, mars::GpsVelSensorClass, mars::PressureSensorClass, mars::VisionSensorClass, mars::AttitudeSensorClass, mars::BodyvelSensorClass, mars::EmptySensorClass, mars::MagSensorClass, mars::PoseSensorClass, mars::PositionSensorClass, and mars::VelocitySensorClass.
◆ CalcUpdate()
| virtual bool mars::SensorInterface::CalcUpdate |
( |
const Time & |
timestamp, |
|
|
std::shared_ptr< void > |
measurement, |
|
|
const CoreStateType & |
prior_core_state_data, |
|
|
std::shared_ptr< void > |
latest_sensor_data, |
|
|
const Eigen::MatrixXd & |
prior_cov, |
|
|
BufferDataType * |
new_state_data |
|
) |
| |
|
pure virtual |
CalcUpdate Calculates the update for an individual sensor definition.
- Parameters
-
| timestamp | current timestamp |
| measurement | current sensor measurement |
| prior_core_state_data | |
| latest_sensor_data | |
| prior_cov | Prior covariance containing core, sensor and sensor cross covariance |
| new_state_data | Updated state data |
- Returns
- True if the update was successful, false if the update was rejected
Implemented in mars::BodyvelSensorClass, mars::GpsSensorClass, mars::GpsVelSensorClass, mars::MagSensorClass, mars::PoseSensorClass, mars::PositionSensorClass, mars::PressureSensorClass, mars::VelocitySensorClass, mars::VisionSensorClass, mars::ImuSensorClass, mars::EmptySensorClass, and mars::AttitudeSensorClass.
◆ get_covariance()
| virtual Eigen::MatrixXd mars::SensorInterface::get_covariance |
( |
const std::shared_ptr< void > & |
sensor_data | ) |
|
|
pure virtual |
get_covariance Resolves a void pointer to the covariance matrix of the corresponding sensor type Each sensor is responsible to cast its own data type
- Parameters
-
- Returns
- Covariance matrix contained in the sensor data struct
Implemented in mars::ImuSensorClass, mars::AttitudeSensorClass, mars::BodyvelSensorClass, mars::EmptySensorClass, mars::GpsSensorClass, mars::GpsVelSensorClass, mars::MagSensorClass, mars::PoseSensorClass, mars::PositionSensorClass, mars::PressureSensorClass, mars::VelocitySensorClass, and mars::VisionSensorClass.
The documentation for this class was generated from the following file:
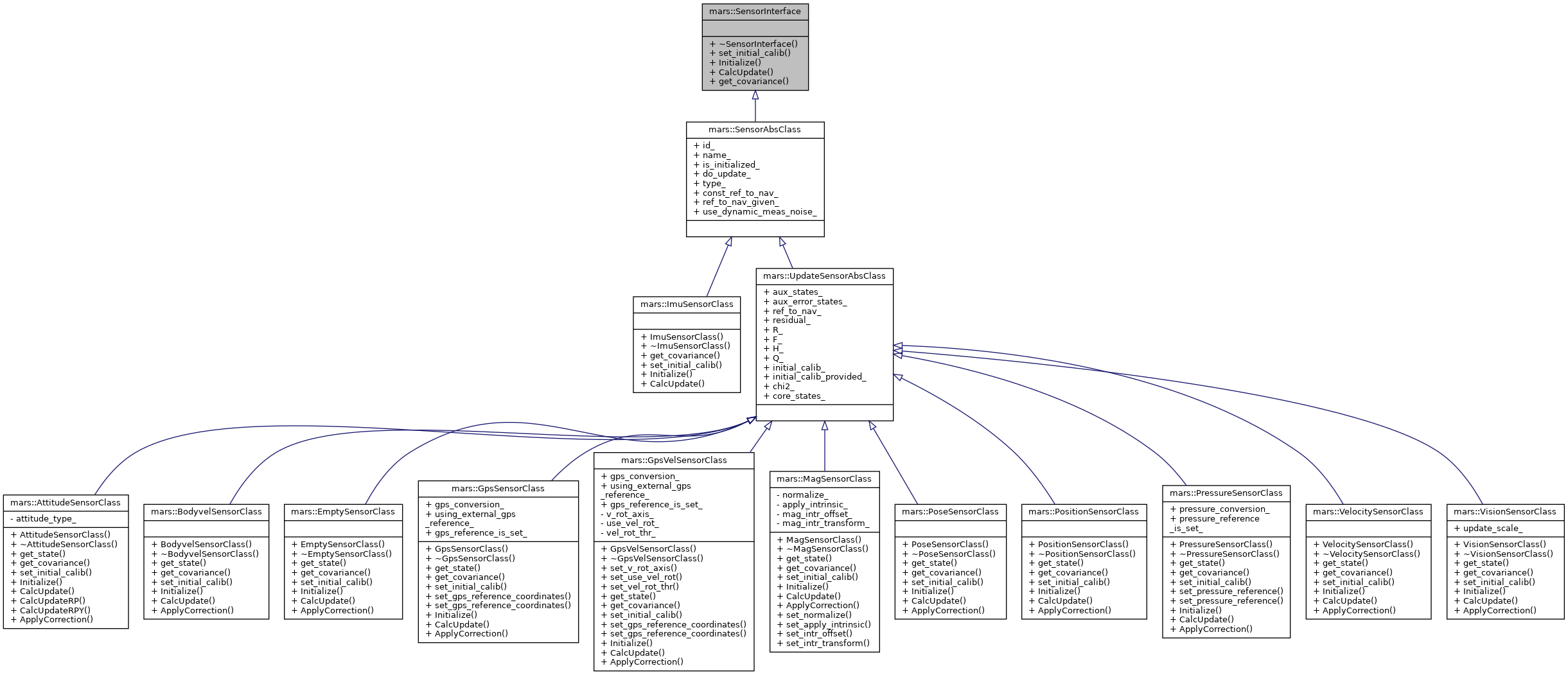
 Inheritance diagram for mars::SensorInterface:
Inheritance diagram for mars::SensorInterface: