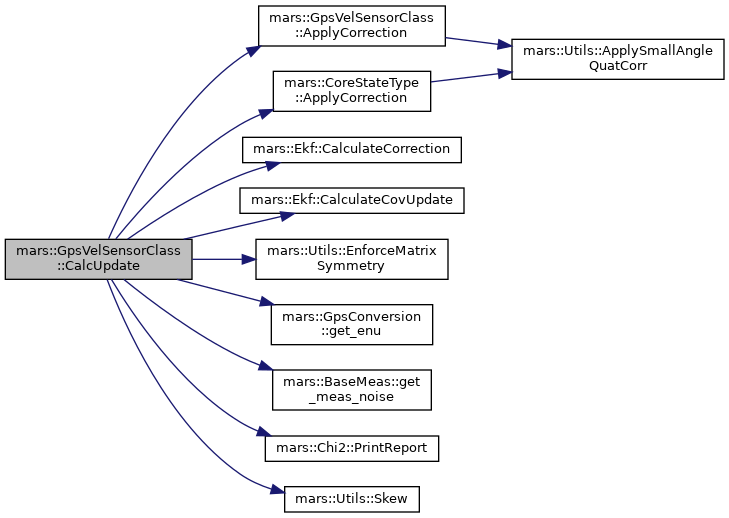
CalcUpdate Calculates the update for an individual sensor definition.
171 {
172
173 GpsVelMeasurementType* meas = static_cast<GpsVelMeasurementType*>(measurement.get());
175
176
178 Eigen::Vector3d v_meas = meas->velocity_;
179
180
181 GpsVelSensorStateType prior_sensor_state(prior_sensor_data->state_);
182
183
184
185 Eigen::MatrixXd R_meas_dyn;
187 {
188 meas->get_meas_noise(&R_meas_dyn);
189 }
190 else
191 {
192 R_meas_dyn = this->
R_.asDiagonal();
193 }
194 Eigen::MatrixXd R_meas(R_meas_dyn);
195
197 const int size_of_sensor_state = prior_sensor_state.cov_size_;
198 const int size_of_full_error_state = size_of_core_state + size_of_sensor_state;
199 const Eigen::MatrixXd P = prior_cov;
200 assert(P.size() == size_of_full_error_state * size_of_full_error_state);
201
202
203 const Eigen::Matrix3d I_3 = Eigen::Matrix3d::Identity();
204 const Eigen::Matrix3d O_3 = Eigen::Matrix3d::Zero();
205
206 const Eigen::Vector3d omega_i = prior_core_state.w_m_;
207
208 const Eigen::Vector3d P_wi = prior_core_state.p_wi_;
209 const Eigen::Vector3d V_wi = prior_core_state.v_wi_;
210 const Eigen::Vector3d b_w = prior_core_state.b_w_;
211 const Eigen::Matrix3d R_wi = prior_core_state.q_wi_.toRotationMatrix();
212 const Eigen::Vector3d P_ig = prior_sensor_state.p_ig_;
213
214 const Eigen::Vector3d P_gw_w = prior_sensor_state.p_gw_w_;
215 const Eigen::Matrix3d R_gw_w = prior_sensor_state.q_gw_w_.toRotationMatrix();
216
217
218 const Eigen::Matrix3d Hp_pwi = R_gw_w;
219 const Eigen::Matrix3d Hp_vwi = O_3;
220 const Eigen::Matrix3d Hp_rwi = -R_gw_w * R_wi *
Utils::Skew(P_ig);
221 const Eigen::Matrix3d Hp_bw = O_3;
222 const Eigen::Matrix3d Hp_ba = O_3;
223
224 const Eigen::Matrix3d Hp_pig = R_gw_w * R_wi;
225 const Eigen::Matrix3d Hp_pgw_w = O_3;
226 const Eigen::Matrix3d Hp_rgw_w = O_3;
227
228 const int num_states = static_cast<int>(Hp_pwi.cols() + Hp_vwi.cols() + Hp_rwi.cols() + Hp_bw.cols() +
229 Hp_ba.cols() + Hp_pig.cols() + Hp_pgw_w.cols() + Hp_rgw_w.cols());
230
231
232 Eigen::MatrixXd H_p(3, num_states);
233 H_p << Hp_pwi, Hp_vwi, Hp_rwi, Hp_bw, Hp_ba, Hp_pig, Hp_pgw_w, Hp_rgw_w;
234
235
236 Eigen::MatrixXd H_v(3, num_states);
237 Eigen::Vector3d v_est;
238
240 {
241
242 const Eigen::Vector3d mu = V_wi + R_wi *
Utils::Skew(omega_i - b_w) * P_ig;
243 const Eigen::Vector3d d_mu = mu / mu.norm();
245
246 const Eigen::Matrix3d Hv_pwi = O_3;
247 const Eigen::Matrix3d Hv_vwi = R_wi * alpha * d_mu.transpose();
248 const Eigen::Matrix3d Hv_rwi =
251
252 const Eigen::Matrix3d Hv_bw = O_3;
253 const Eigen::Matrix3d Hv_ba = O_3;
254
255 const Eigen::Matrix3d Hv_pig = R_wi * alpha * d_mu.transpose() * R_wi *
Utils::Skew(omega_i - b_w);
256 const Eigen::Matrix3d Hv_pgw_w = O_3;
257 const Eigen::Matrix3d Hv_rgw_w = O_3;
258
259 H_v << Hv_pwi, Hv_vwi, Hv_rwi, Hv_bw, Hv_ba, Hv_pig, Hv_pgw_w, Hv_rgw_w;
260 v_est = R_wi * alpha * (mu).norm();
261 }
262 else
263 {
264 const Eigen::Matrix3d Hv_pwi = O_3;
265 const Eigen::Matrix3d Hv_vwi = I_3;
267 const Eigen::Matrix3d Hv_bw = O_3;
268 const Eigen::Matrix3d Hv_ba = O_3;
269
270 const Eigen::Matrix3d Hv_pig = R_wi *
Utils::Skew(omega_i - b_w);
271 const Eigen::Matrix3d Hv_pgw_w = O_3;
272 const Eigen::Matrix3d Hv_rgw_w = O_3;
273
274 H_v << Hv_pwi, Hv_vwi, Hv_rwi, Hv_bw, Hv_ba, Hv_pig, Hv_pgw_w, Hv_rgw_w;
275 v_est = V_wi + R_wi *
Utils::Skew(omega_i - b_w) * P_ig;
276 }
277
278
279 Eigen::MatrixXd H(H_p.rows() + H_v.rows(), H_v.cols());
280 H << H_p, H_v;
281
282
283
284 const Eigen::Vector3d p_est = P_gw_w + R_gw_w * (P_wi + R_wi * P_ig);
285 const Eigen::Vector3d res_p = p_meas - p_est;
286
287
288 const Eigen::Vector3d res_v = v_meas - v_est;
289
290
291 residual_ = Eigen::MatrixXd(res_p.rows() + res_v.rows(), 1);
293
294
296 const Eigen::MatrixXd correction = ekf.CalculateCorrection(&
chi2_);
297 assert(correction.size() == size_of_full_error_state * 1);
298
299
301 {
303 return false;
304 }
305
306 Eigen::MatrixXd P_updated = ekf.CalculateCovUpdate();
307 assert(P_updated.size() == size_of_full_error_state * size_of_full_error_state);
309
310
313
314
315 const Eigen::MatrixXd sensor_correction = correction.block(size_of_core_state, 0, size_of_sensor_state, 1);
316 const GpsVelSensorStateType corrected_sensor_state =
ApplyCorrection(prior_sensor_state, sensor_correction);
317
318
319
320 CoreType core_data;
322 core_data.state_ = corrected_core_state;
323
324
325 std::shared_ptr<GpsVelSensorData> sensor_data(std::make_shared<GpsVelSensorData>());
326 sensor_data->set_cov(P_updated);
327 sensor_data->state_ = corrected_sensor_state;
328
329 BufferDataType state_entry(std::make_shared<CoreType>(core_data), sensor_data);
330
332 {
333
334 }
335 else
336 {
337
338 }
339
340 *new_state_data = state_entry;
341
342 return true;
343 }
bool passed_
Determine if the test is performed or not.
Definition ekf.h:84
bool do_test_
Upper critival value.
Definition ekf.h:83
void PrintReport(const std::string &name)
PrintReport Print a formated report e.g. if the test did not pass.
static constexpr int size_error_
Definition core_state_type.h:38
static CoreStateType ApplyCorrection(CoreStateType state_prior, Eigen::Matrix< double, CoreStateType::size_error_, 1 > correction)
ApplyCorrection.
Definition core_state_type.h:46
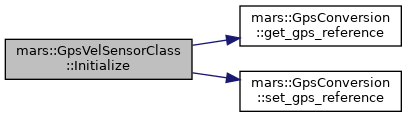
Eigen::Matrix< double, 3, 1 > get_enu(mars::GpsCoordinates coordinates)
get_enu get current GPS reference coordinates
GpsVelSensorStateType ApplyCorrection(const GpsVelSensorStateType &prior_sensor_state, const Eigen::MatrixXd &correction)
Definition gps_w_vel_sensor_class.h:345
bool use_dynamic_meas_noise_
True if dynamic noise values from measurements should be used.
Definition sensor_abs_class.h:29
Eigen::VectorXd R_
Measurement noise "squared".
Definition update_sensor_abs_class.h:32
Eigen::MatrixXd residual_
Definition update_sensor_abs_class.h:31
static Eigen::MatrixXd EnforceMatrixSymmetry(const Eigen::Ref< const Eigen::MatrixXd > &mat_in)
EnforceMatrixSymmetry.
static Eigen::Matrix3d Skew(const Eigen::Vector3d &v)
skew generate the skew symmetric matrix of v
Eigen::Matrix< double, CoreStateType::size_error_, 1 > CoreStateVector
Definition core_state_type.h:135
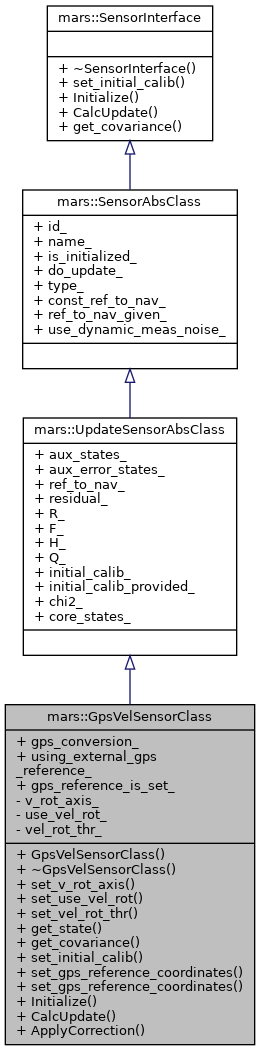
 Inheritance diagram for mars::GpsVelSensorClass:
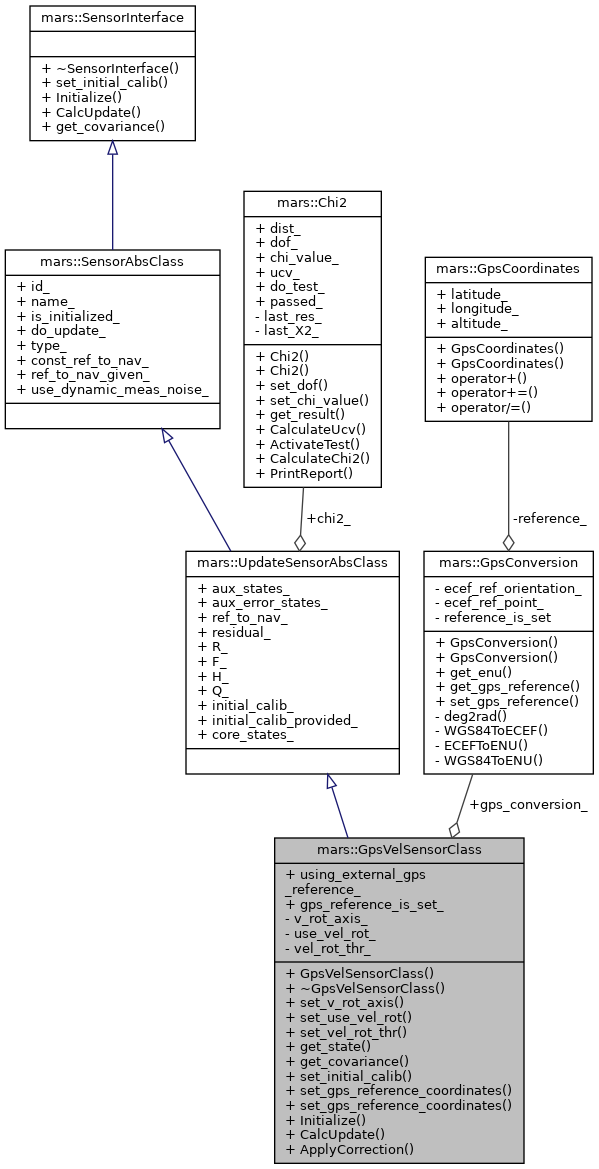
Inheritance diagram for mars::GpsVelSensorClass: