#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/core_state.h>
|
| | CoreState () |
| | CoreState Default constructor.
|
| |
| void | set_fixed_acc_bias (const bool &value) |
| | set_fixed_acc_bias disable or enable the estimation of the accelerometer bias
|
| |
| void | set_fixed_gyro_bias (const bool &value) |
| | set_fixed_gyro_bias disable or enable the estimation of the gyro bias
|
| |
| void | set_propagation_sensor (std::shared_ptr< SensorAbsClass > propagation_sensor) |
| | set_propagation_sensor Stores a reference to the propagation sensor
|
| |
| void | set_noise_std (const Eigen::Vector3d &n_w, const Eigen::Vector3d &n_bw, const Eigen::Vector3d &n_a, const Eigen::Vector3d &n_ba) |
| | set_noise_std Sets the noise and bias of the propagation sensor
|
| |
| CoreStateType | InitializeState (const Eigen::Vector3d &ang_vel, const Eigen::Vector3d &lin_acc, const Eigen::Vector3d &p_wi, const Eigen::Vector3d &v_wi, const Eigen::Quaterniond &q_wi, const Eigen::Vector3d &b_w, const Eigen::Vector3d &b_a) |
| | InitializeState Initializes the core state.
|
| |
| void | set_initial_covariance (const Eigen::Vector3d &p, const Eigen::Vector3d &v, const Eigen::Vector3d &q, const Eigen::Vector3d &bw, const Eigen::Vector3d &ba) |
| | set_initial_covariance used to set the initial covariance of the core states
|
| |
| CoreStateMatrix | InitializeCovariance () |
| | InitializeCovariance Returnes the initialized core covariance.
|
| |
| CoreStateType | PropagateState (const CoreStateType &prior_state, const IMUMeasurementType &measurement, const double &dt) |
| | PropagateState Performs the state propagation.
|
| |
| CoreType | PredictProcessCovariance (const CoreType &prior_core_state, const IMUMeasurementType &system_input, const double &dt) |
| | PredictProcessCovariance Predicted core state covariance and generate the state transition matrix.
|
| |
|
| static CoreStateMatrix | GenerateFdTaylor () |
| | GenerateFdTaylor Generates the state-transition matrix with cut-off Taylor series.
|
| |
| static CoreStateMatrix | GenerateFdClosedForm () |
| | GenerateFdClosedForm Generates the state-transition matrix in closed-form.
|
| |
| static CoreStateMatrix | GenerateFdSmallAngleApprox (const Eigen::Quaterniond &q_wi, const Eigen::Vector3d &a_est, const Eigen::Vector3d &w_est, const double &dt) |
| | GenerateFdSmallAngleApprox Generates the state-transition matrix with small angle approximation.
|
| |
| static CoreStateMatrix | CalcQSmallAngleApprox (const double &dt, const Eigen::Quaterniond &q_wi, const Eigen::Vector3d &a_m, const Eigen::Vector3d &n_a, const Eigen::Vector3d &b_a, const Eigen::Vector3d &n_ba, const Eigen::Vector3d &w_m, const Eigen::Vector3d &n_w, const Eigen::Vector3d &b_w, const Eigen::Vector3d &n_bw) |
| |
|
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW CoreStateType | state |
| | Core State elements.
|
| |
| Eigen::Vector3d | n_a_ { Eigen::Vector3d::Zero() } |
| | noise for linear acceleration measurement
|
| |
| Eigen::Vector3d | n_ba_ { Eigen::Vector3d::Zero() } |
| | random walk for linear acceleration bias
|
| |
| Eigen::Vector3d | n_w_ { Eigen::Vector3d::Zero() } |
| | noise for angular velocity measurement
|
| |
| Eigen::Vector3d | n_bw_ { Eigen::Vector3d::Zero() } |
| | random walk for angular velocity bias
|
| |
| const Eigen::Vector3d | g_ { 0, 0, 9.81 } |
| | defined gravity
|
| |
| CoreStateMatrix | initial_covariance_ |
| |
| std::shared_ptr< SensorAbsClass > | propagation_sensor_ { nullptr } |
| | Reference to the propagation sensor.
|
| |
| bool | test_state_transition_ { false } |
| | If true, the class performs tests on the state-transition properties.
|
| |
| bool | verbose_ { false } |
| | increased output of information
|
| |
◆ CoreState()
| mars::CoreState::CoreState |
( |
| ) |
|
◆ set_fixed_acc_bias()
| void mars::CoreState::set_fixed_acc_bias |
( |
const bool & |
value | ) |
|
set_fixed_acc_bias disable or enable the estimation of the accelerometer bias
- Parameters
-
◆ set_fixed_gyro_bias()
| void mars::CoreState::set_fixed_gyro_bias |
( |
const bool & |
value | ) |
|
set_fixed_gyro_bias disable or enable the estimation of the gyro bias
- Parameters
-
◆ set_propagation_sensor()
| void mars::CoreState::set_propagation_sensor |
( |
std::shared_ptr< SensorAbsClass > |
propagation_sensor | ) |
|
set_propagation_sensor Stores a reference to the propagation sensor
- Parameters
-
◆ set_noise_std()
| void mars::CoreState::set_noise_std |
( |
const Eigen::Vector3d & |
n_w, |
|
|
const Eigen::Vector3d & |
n_bw, |
|
|
const Eigen::Vector3d & |
n_a, |
|
|
const Eigen::Vector3d & |
n_ba |
|
) |
| |
set_noise_std Sets the noise and bias of the propagation sensor
- Parameters
-
◆ InitializeState()
| CoreStateType mars::CoreState::InitializeState |
( |
const Eigen::Vector3d & |
ang_vel, |
|
|
const Eigen::Vector3d & |
lin_acc, |
|
|
const Eigen::Vector3d & |
p_wi, |
|
|
const Eigen::Vector3d & |
v_wi, |
|
|
const Eigen::Quaterniond & |
q_wi, |
|
|
const Eigen::Vector3d & |
b_w, |
|
|
const Eigen::Vector3d & |
b_a |
|
) |
| |
InitializeState Initializes the core state.
- Parameters
-
| ang_vel | |
| lin_acc | |
| p_wi | |
| v_wi | |
| q_wi | |
| b_w | |
| b_a | |
- Returns
◆ set_initial_covariance()
| void mars::CoreState::set_initial_covariance |
( |
const Eigen::Vector3d & |
p, |
|
|
const Eigen::Vector3d & |
v, |
|
|
const Eigen::Vector3d & |
q, |
|
|
const Eigen::Vector3d & |
bw, |
|
|
const Eigen::Vector3d & |
ba |
|
) |
| |
set_initial_covariance used to set the initial covariance of the core states
- Returns
◆ InitializeCovariance()
InitializeCovariance Returnes the initialized core covariance.
- Returns
◆ PropagateState()
PropagateState Performs the state propagation.
- Parameters
-
| prior_state | Prior state for the propagation |
| measurement | System input |
| dt | propagation timespan |
- Returns
- Propagated core state
- Note
- Previous state is x_t-1 , Current state is x_t ew and ea are the estimates of the inputs because the bias are removed and the error state definition
-
first order Quaternion integration Sola, J. (2017). Quaternion kinematics for the error-state Kalman filter. arXiv preprint arXiv:1711.02508.
◆ PredictProcessCovariance()
PredictProcessCovariance Predicted core state covariance and generate the state transition matrix.
- Parameters
-
| prior_core_state | |
| system_input | Measurement for the system input |
| dt | propagation timespan |
- Returns
- Core state covariance and state transition matrix
- Note
- The Covariance is generated for the error state definition.
◆ GenerateFdTaylor()
GenerateFdTaylor Generates the state-transition matrix with cut-off Taylor series.
- Returns
- state-transition matrix
◆ GenerateFdClosedForm()
GenerateFdClosedForm Generates the state-transition matrix in closed-form.
- Note
- Solar - Quaternion Kinematics Section B.3
- Returns
- state-transition matrix
◆ GenerateFdSmallAngleApprox()
| static CoreStateMatrix mars::CoreState::GenerateFdSmallAngleApprox |
( |
const Eigen::Quaterniond & |
q_wi, |
|
|
const Eigen::Vector3d & |
a_est, |
|
|
const Eigen::Vector3d & |
w_est, |
|
|
const double & |
dt |
|
) |
| |
|
static |
GenerateFdSmallAngleApprox Generates the state-transition matrix with small angle approximation.
- Parameters
-
| q_wi | orientation of imu in world |
| a_est | the estimate of the acceleration (a_m - b_a) |
| w_est | the estimate of the angular velocity (w_m - b_w) |
| dt | time step |
- Note
- Eq.(3.35) in S. Weiss, "Vision Based Navigation for Micro Helicopters (PhD Thesis - Weiss 2012)," Thesis.
- Returns
- state-transition matrix
◆ CalcQSmallAngleApprox()
| static CoreStateMatrix mars::CoreState::CalcQSmallAngleApprox |
( |
const double & |
dt, |
|
|
const Eigen::Quaterniond & |
q_wi, |
|
|
const Eigen::Vector3d & |
a_m, |
|
|
const Eigen::Vector3d & |
n_a, |
|
|
const Eigen::Vector3d & |
b_a, |
|
|
const Eigen::Vector3d & |
n_ba, |
|
|
const Eigen::Vector3d & |
w_m, |
|
|
const Eigen::Vector3d & |
n_w, |
|
|
const Eigen::Vector3d & |
b_w, |
|
|
const Eigen::Vector3d & |
n_bw |
|
) |
| |
|
static |
◆ fixed_acc_bias_
| bool mars::CoreState::fixed_acc_bias_ { false } |
|
private |
bias are not estimated if fixed_bias = true
◆ fixed_gyro_bias_
| bool mars::CoreState::fixed_gyro_bias_ { false } |
|
private |
bias are not estimated if fixed_bias = true
◆ state
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW CoreStateType mars::CoreState::state |
◆ n_a_
| Eigen::Vector3d mars::CoreState::n_a_ { Eigen::Vector3d::Zero() } |
noise for linear acceleration measurement
35{ Eigen::Vector3d::Zero() };
◆ n_ba_
| Eigen::Vector3d mars::CoreState::n_ba_ { Eigen::Vector3d::Zero() } |
random walk for linear acceleration bias
36{ Eigen::Vector3d::Zero() };
◆ n_w_
| Eigen::Vector3d mars::CoreState::n_w_ { Eigen::Vector3d::Zero() } |
noise for angular velocity measurement
37{ Eigen::Vector3d::Zero() };
◆ n_bw_
| Eigen::Vector3d mars::CoreState::n_bw_ { Eigen::Vector3d::Zero() } |
random walk for angular velocity bias
38{ Eigen::Vector3d::Zero() };
◆ g_
| const Eigen::Vector3d mars::CoreState::g_ { 0, 0, 9.81 } |
◆ initial_covariance_
◆ propagation_sensor_
| std::shared_ptr<SensorAbsClass> mars::CoreState::propagation_sensor_ { nullptr } |
Reference to the propagation sensor.
◆ test_state_transition_
| bool mars::CoreState::test_state_transition_ { false } |
If true, the class performs tests on the state-transition properties.
◆ verbose_
| bool mars::CoreState::verbose_ { false } |
increased output of information
The documentation for this class was generated from the following file:
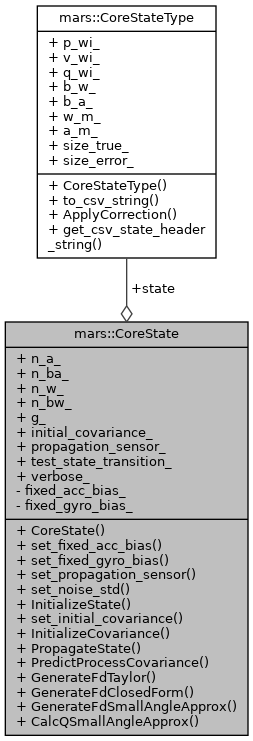
 Collaboration diagram for mars::CoreState:
Collaboration diagram for mars::CoreState: