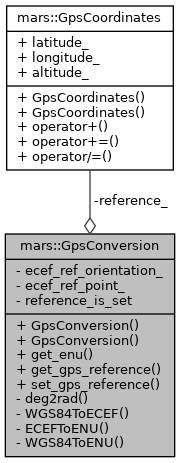
The GpsConversion class.
More...
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensors/gps/gps_conversion.h>
|
| double | deg2rad (const double °) |
| | deg2rad
|
| |
| Eigen::Matrix< double, 3, 1 > | WGS84ToECEF (const mars::GpsCoordinates &coordinates) |
| | WGS84ToECEF World Geodetic System 1984 model (WGS-84) to Earth-Centered-Earth-Fixed (ECEF)
|
| |
| Eigen::Matrix< double, 3, 1 > | ECEFToENU (const Eigen::Matrix< double, 3, 1 > &ecef) |
| | ECEFToENU Earth-Centered-Earth-Fixed (ECEF) to East-North-Up (ENU)
|
| |
| Eigen::Matrix< double, 3, 1 > | WGS84ToENU (const mars::GpsCoordinates &coordinates) |
| | WGS84ToENU World Geodetic System 1984 model (WGS-84) to East-North-Up (ENU) based on given reference coordinates 'reference_'.
|
| |
The GpsConversion class.
- Note
- Crassidis, J. L. (2006). Sigma-point Kalman filtering for integrated GPS and inertial navigation.
◆ GpsConversion() [1/2]
◆ GpsConversion() [2/2]
| mars::GpsConversion::GpsConversion |
( |
| ) |
|
|
default |
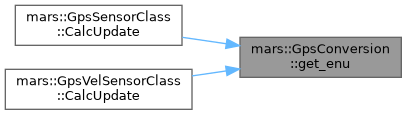
◆ get_enu()
get_enu get current GPS reference coordinates
- Parameters
-
| coordinates | GPS coordinates |
- Returns
- ENU local position
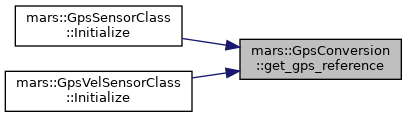
◆ get_gps_reference()
get_gps_reference
- Returns
- GPS reference coordinates
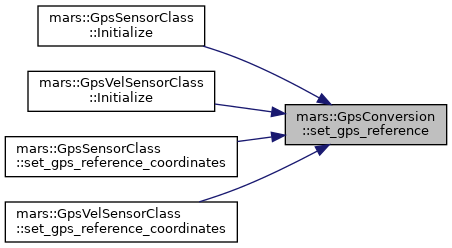
◆ set_gps_reference()
set_gps_reference
- Parameters
-
| coordinates | GPS coordinates |
◆ deg2rad()
| double mars::GpsConversion::deg2rad |
( |
const double & |
deg | ) |
|
|
private |
deg2rad
- Parameters
-
- Returns
- rad
◆ WGS84ToECEF()
| Eigen::Matrix< double, 3, 1 > mars::GpsConversion::WGS84ToECEF |
( |
const mars::GpsCoordinates & |
coordinates | ) |
|
|
private |
WGS84ToECEF World Geodetic System 1984 model (WGS-84) to Earth-Centered-Earth-Fixed (ECEF)
- Parameters
-
| coordinates | GPS coordinates |
- Returns
- ecef position
◆ ECEFToENU()
| Eigen::Matrix< double, 3, 1 > mars::GpsConversion::ECEFToENU |
( |
const Eigen::Matrix< double, 3, 1 > & |
ecef | ) |
|
|
private |
ECEFToENU Earth-Centered-Earth-Fixed (ECEF) to East-North-Up (ENU)
- Parameters
-
- Returns
- ENU local position
◆ WGS84ToENU()
| Eigen::Matrix< double, 3, 1 > mars::GpsConversion::WGS84ToENU |
( |
const mars::GpsCoordinates & |
coordinates | ) |
|
|
private |
WGS84ToENU World Geodetic System 1984 model (WGS-84) to East-North-Up (ENU) based on given reference coordinates 'reference_'.
- Parameters
-
| coordinates | GPS coordinates |
- Returns
- ENU local position
◆ reference_
GPS reference coordinates.
◆ ecef_ref_orientation_
| Eigen::Matrix3d mars::GpsConversion::ecef_ref_orientation_ |
|
private |
◆ ecef_ref_point_
| Eigen::Matrix<double, 3, 1> mars::GpsConversion::ecef_ref_point_ |
|
private |
◆ reference_is_set
| bool mars::GpsConversion::reference_is_set { false } |
|
private |
The documentation for this class was generated from the following file:
 Collaboration diagram for mars::GpsConversion:
Collaboration diagram for mars::GpsConversion: