#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensors/update_sensor_abs_class.h>
|
| virtual EIGEN_MAKE_ALIGNED_OPERATOR_NEW | ~SensorInterface ()=default |
| |
| virtual void | set_initial_calib (std::shared_ptr< void > calibration)=0 |
| | set_initial_calib Sets the calibration of an individual sensor
|
| |
| virtual BufferDataType | Initialize (const Time ×tamp, std::shared_ptr< void > measurement, std::shared_ptr< CoreType > latest_core_data)=0 |
| | Initialize the state of an individual sensor.
|
| |
| virtual bool | CalcUpdate (const Time ×tamp, std::shared_ptr< void > measurement, const CoreStateType &prior_core_state_data, std::shared_ptr< void > latest_sensor_data, const Eigen::MatrixXd &prior_cov, BufferDataType *new_state_data)=0 |
| | CalcUpdate Calculates the update for an individual sensor definition.
|
| |
| virtual Eigen::MatrixXd | get_covariance (const std::shared_ptr< void > &sensor_data)=0 |
| | get_covariance Resolves a void pointer to the covariance matrix of the corresponding sensor type Each sensor is responsible to cast its own data type
|
| |
◆ aux_states_
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW int mars::UpdateSensorAbsClass::aux_states_ |
◆ aux_error_states_
| int mars::UpdateSensorAbsClass::aux_error_states_ |
◆ ref_to_nav_
| int mars::UpdateSensorAbsClass::ref_to_nav_ |
◆ residual_
| Eigen::MatrixXd mars::UpdateSensorAbsClass::residual_ |
◆ R_
| Eigen::VectorXd mars::UpdateSensorAbsClass::R_ |
Measurement noise "squared".
◆ F_
| Eigen::MatrixXd mars::UpdateSensorAbsClass::F_ |
◆ H_
| Eigen::MatrixXd mars::UpdateSensorAbsClass::H_ |
◆ Q_
| Eigen::MatrixXd mars::UpdateSensorAbsClass::Q_ |
◆ initial_calib_
| std::shared_ptr<void> mars::UpdateSensorAbsClass::initial_calib_ { nullptr } |
◆ initial_calib_provided_
| bool mars::UpdateSensorAbsClass::initial_calib_provided_ { false } |
True if an initial calibration was provided.
◆ chi2_
| Chi2 mars::UpdateSensorAbsClass::chi2_ |
◆ core_states_
| std::shared_ptr<CoreState> mars::UpdateSensorAbsClass::core_states_ |
The documentation for this class was generated from the following file:
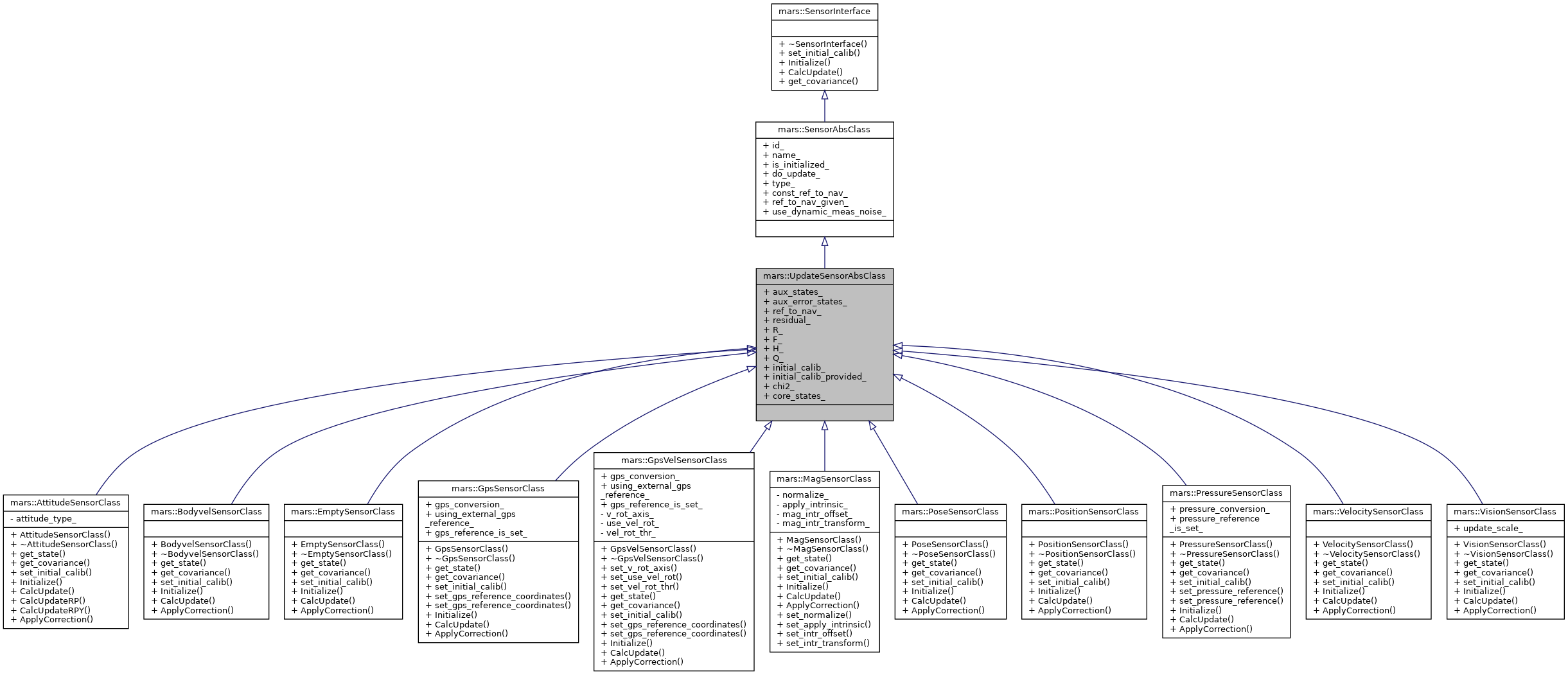
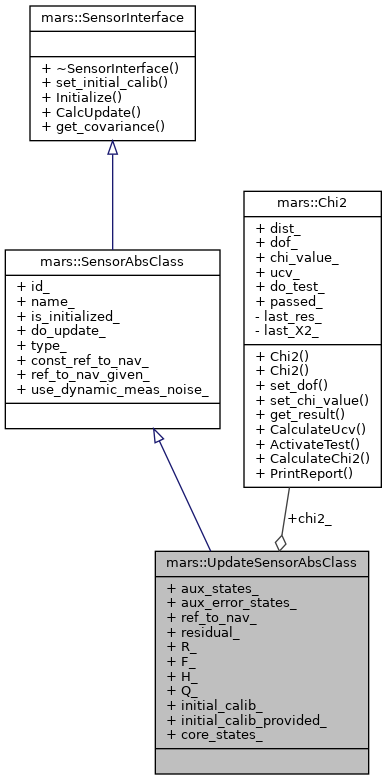
 Inheritance diagram for mars::UpdateSensorAbsClass:
Inheritance diagram for mars::UpdateSensorAbsClass: