|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/sensors/measurement_base_class.h>
 Inheritance diagram for mars::BaseMeas: Collaboration diagram for mars::BaseMeas:
Inheritance diagram for mars::BaseMeas: Collaboration diagram for mars::BaseMeas:Public Member Functions | |
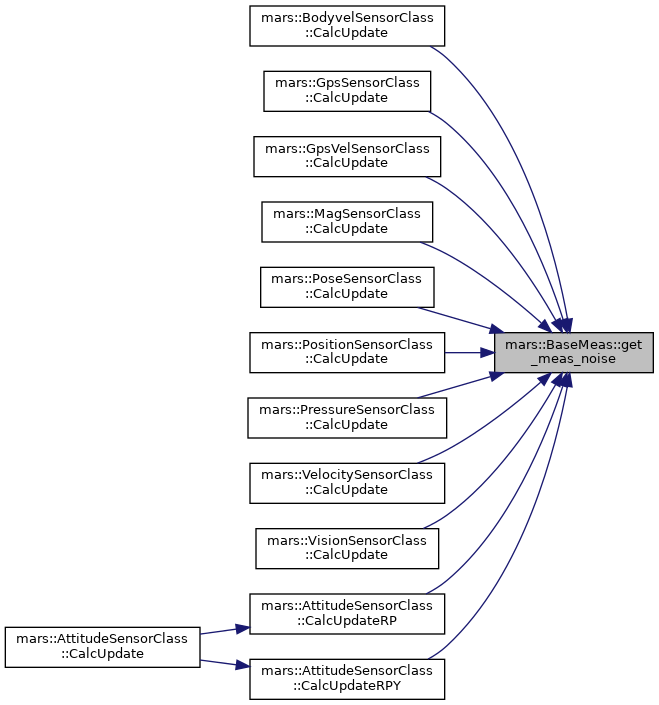
| bool | get_meas_noise (Eigen::MatrixXd *meas_noise) |
| get the measurement noise associated with the current sensor measurement | |
| void | set_meas_noise (const Eigen::MatrixXd &meas_noise) |
| Public Member Functions inherited from mars::MeasInterface | |
| virtual | ~MeasInterface ()=default |
Public Attributes | |
| Eigen::MatrixXd | meas_noise_ |
| bool | has_meas_noise { false } |
|
inlinevirtual |
get the measurement noise associated with the current sensor measurement
| sensor_data | contains the current sensor measurement |
Implements mars::MeasInterface.
Here is the caller graph for this function:
|
inlinevirtual |
Implements mars::MeasInterface.
| Eigen::MatrixXd mars::BaseMeas::meas_noise_ |
| bool mars::BaseMeas::has_meas_noise { false } |