|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
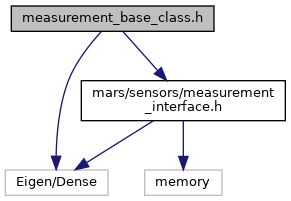
 Include dependency graph for measurement_base_class.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for measurement_base_class.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| class | mars::BaseMeas |
Namespaces | |
| namespace | mars |