|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
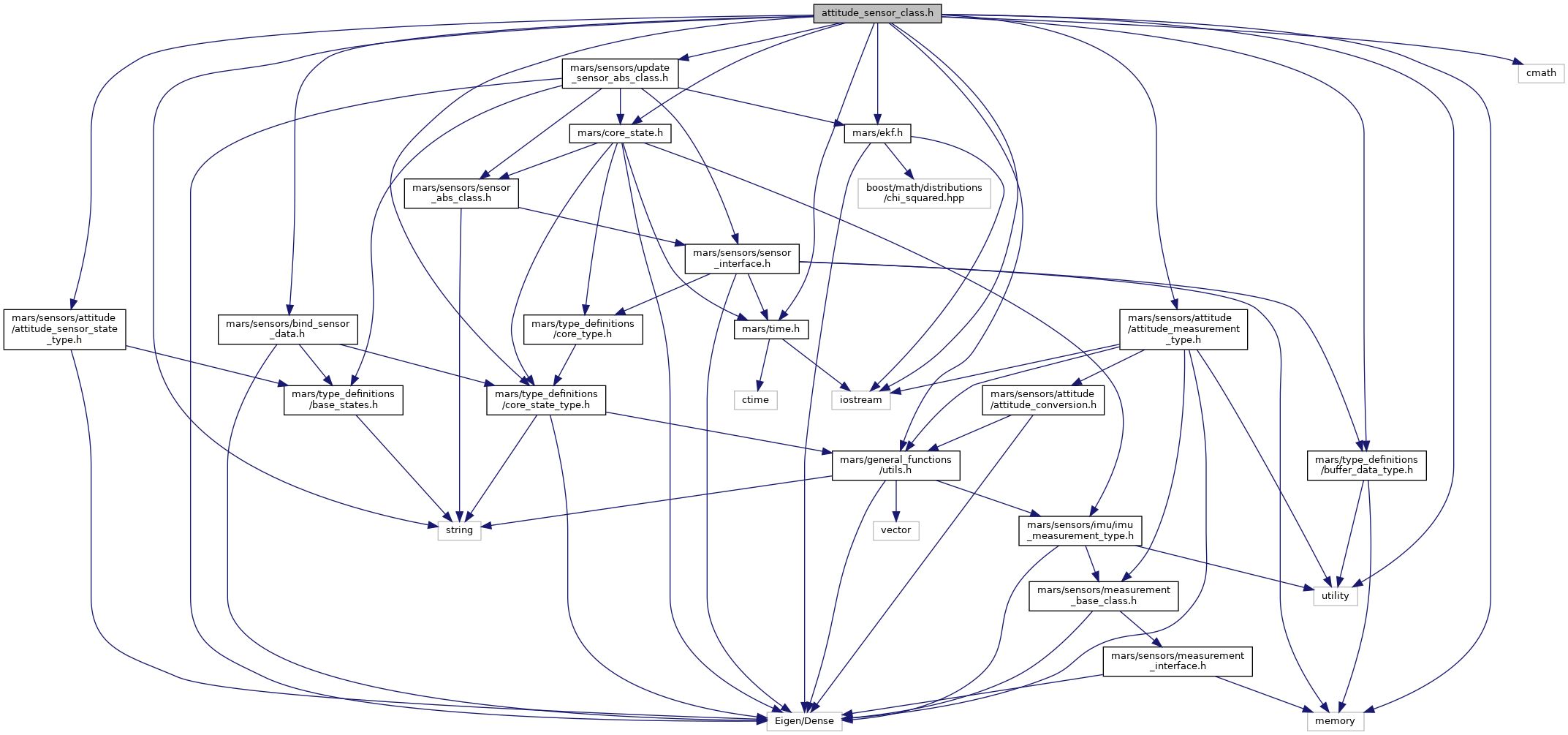
#include <mars/core_state.h>#include <mars/ekf.h>#include <mars/general_functions/utils.h>#include <mars/sensors/attitude/attitude_measurement_type.h>#include <mars/sensors/attitude/attitude_sensor_state_type.h>#include <mars/sensors/bind_sensor_data.h>#include <mars/sensors/update_sensor_abs_class.h>#include <mars/time.h>#include <mars/type_definitions/buffer_data_type.h>#include <mars/type_definitions/core_state_type.h>#include <cmath>#include <iostream>#include <memory>#include <string>#include <utility> Include dependency graph for attitude_sensor_class.h:
Include dependency graph for attitude_sensor_class.h:Go to the source code of this file.
Classes | |
| class | mars::AttitudeSensorClass |
Namespaces | |
| namespace | mars |
Typedefs | |
| using | mars::AttitudeSensorData = BindSensorData< AttitudeSensorStateType > |
Enumerations | |
| enum class | mars::AttitudeSensorType { mars::RP_TYPE , mars::RPY_TYPE } |
Functions | |
| std::ostream & | mars::operator<< (std::ostream &os, AttitudeSensorType type) |