|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
Loading...
Searching...
No Matches
|
mars_lib 0.1.0.2abe2576fe7f
Modular and Robust Sensor-Fusion
|
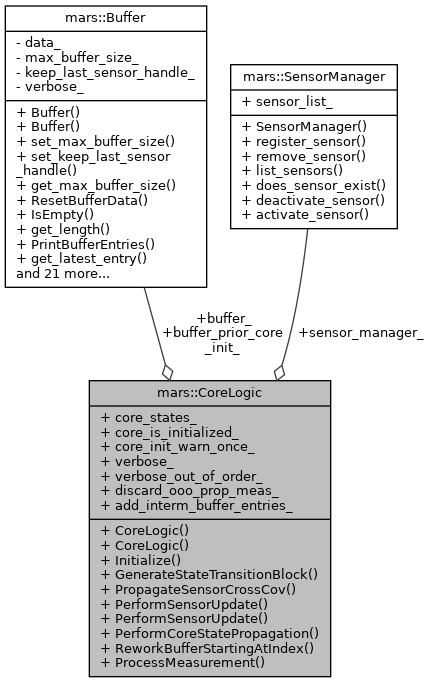
The CoreLogic class represents the high-level logic for the operation of the filter. More...
#include </home/runner/work/mars_lib/mars_lib/source/mars/include/mars/core_logic.h>
 Collaboration diagram for mars::CoreLogic:
Collaboration diagram for mars::CoreLogic:Public Member Functions | |
| CoreLogic (std::shared_ptr< CoreState > core_states) | |
| CoreLogic. | |
| CoreLogic ()=default | |
| int | Initialize (const Eigen::Vector3d &p_wi_init, const Eigen::Quaterniond &q_wi_init) |
| Initialize the filter with information available in the prior init buffer. | |
| CoreStateMatrix | GenerateStateTransitionBlock (const int &first_transition_idx, const int &last_transition_idx) |
| GenerateStateTransitionBlock Returns the state transition block between 'first_transition_idx' and 'last_transition_idx'. | |
| Eigen::MatrixXd | PropagateSensorCrossCov (const Eigen::MatrixXd &sensor_cov, const CoreStateMatrix &core_cov, const CoreStateMatrix &state_transition) |
| PropagateSensorCrossCov. | |
| bool | PerformSensorUpdate (std::shared_ptr< SensorAbsClass > sensor, const Time ×tamp, BufferEntryType *sensor_data) |
| PerformSensorUpdate Returns new state with corrected state and updated covariance. | |
| bool | PerformSensorUpdate (std::shared_ptr< SensorAbsClass > sensor, const Time ×tamp, BufferEntryType *sensor_data, bool *added_interm_state) |
| void | PerformCoreStatePropagation (std::shared_ptr< SensorAbsClass > sensor, const Time ×tamp, const BufferEntryType &prior_state_entry, BufferEntryType *sensor_entry) |
| PerformCoreStatePropagation Propagates the core state and returns the new state entry. | |
| void | ReworkBufferStartingAtIndex (const int &index) |
| ReworkBufferStartingAtIndex Reprocesses the buffer after an out of order update, starting at given 'idx'. | |
| bool | ProcessMeasurement (std::shared_ptr< SensorAbsClass > sensor, const Time ×tamp, const BufferDataType &data) |
| ProcessMeasurement Processes the sensor input. | |
Public Attributes | |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW std::shared_ptr< CoreState > | core_states_ { nullptr } |
| Buffer | buffer_ |
| Holds a pointer to the core_states. | |
| Buffer | buffer_prior_core_init_ |
| Main buffer of the filter. | |
| SensorManager | sensor_manager_ |
| Buffer that holds measurements prior initialization. | |
| bool | core_is_initialized_ { false } |
| bool | core_init_warn_once_ { false } |
| bool | verbose_ { false } |
| bool | verbose_out_of_order_ { false } |
| Increased output of information. | |
| bool | discard_ooo_prop_meas_ { false } |
| Increased output of information for delayed measurements. | |
| bool | add_interm_buffer_entries_ { false } |
| Discard out of order propagation sensor measurements. | |
The CoreLogic class represents the high-level logic for the operation of the filter.
| mars::CoreLogic::CoreLogic | ( | std::shared_ptr< CoreState > | core_states | ) |
Determines if intermediate entries before a sensor update are stored to the buffer
| core_states | Core state type used for updates and propagation |
|
default |
| int mars::CoreLogic::Initialize | ( | const Eigen::Vector3d & | p_wi_init, |
| const Eigen::Quaterniond & | q_wi_init | ||
| ) |
Initialize the filter with information available in the prior init buffer.
Uses the latest propagation sensor to initialize the core state and writes the init state to the main buffer.
| CoreStateMatrix mars::CoreLogic::GenerateStateTransitionBlock | ( | const int & | first_transition_idx, |
| const int & | last_transition_idx | ||
| ) |
GenerateStateTransitionBlock Returns the state transition block between 'first_transition_idx' and 'last_transition_idx'.
| Eigen::MatrixXd mars::CoreLogic::PropagateSensorCrossCov | ( | const Eigen::MatrixXd & | sensor_cov, |
| const CoreStateMatrix & | core_cov, | ||
| const CoreStateMatrix & | state_transition | ||
| ) |
PropagateSensorCrossCov.
| bool mars::CoreLogic::PerformSensorUpdate | ( | std::shared_ptr< SensorAbsClass > | sensor, |
| const Time & | timestamp, | ||
| BufferEntryType * | sensor_data | ||
| ) |
PerformSensorUpdate Returns new state with corrected state and updated covariance.
| bool mars::CoreLogic::PerformSensorUpdate | ( | std::shared_ptr< SensorAbsClass > | sensor, |
| const Time & | timestamp, | ||
| BufferEntryType * | sensor_data, | ||
| bool * | added_interm_state | ||
| ) |
| void mars::CoreLogic::PerformCoreStatePropagation | ( | std::shared_ptr< SensorAbsClass > | sensor, |
| const Time & | timestamp, | ||
| const BufferEntryType & | prior_state_entry, | ||
| BufferEntryType * | sensor_entry | ||
| ) |
PerformCoreStatePropagation Propagates the core state and returns the new state entry.
We know that the current sensor is the input for the propagation. All that is needed is the past core state and the input for the system determined by the propagation sensor handle. The core_state propagation function needs to be able to handle the data structure of the propagation sensor.
| void mars::CoreLogic::ReworkBufferStartingAtIndex | ( | const int & | index | ) |
ReworkBufferStartingAtIndex Reprocesses the buffer after an out of order update, starting at given 'idx'.
| bool mars::CoreLogic::ProcessMeasurement | ( | std::shared_ptr< SensorAbsClass > | sensor, |
| const Time & | timestamp, | ||
| const BufferDataType & | data | ||
| ) |
ProcessMeasurement Processes the sensor input.
| sensor | Pointer to the sensor instance associated with the sensor data |
| timestamp | Timestamp associated with the sensor data |
| data | Sensor data to process |
This is the primary function that controls the sensor updates. The function determines filter operations based on the sensor type (propagation or regular sensor).
The function generates a measurement handle decides if the measurement should be used or if it is too old. A check for out of order measurements is performed, and the measurement is either processed depending on the sensor handle either as a propagation sensor or a regular sensor. If the measurement was out of order; the buffer is reprocessed starting at the index of the out of order measurement.
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW std::shared_ptr<CoreState> mars::CoreLogic::core_states_ { nullptr } |
| Buffer mars::CoreLogic::buffer_ |
Holds a pointer to the core_states.
| Buffer mars::CoreLogic::buffer_prior_core_init_ |
Main buffer of the filter.
| SensorManager mars::CoreLogic::sensor_manager_ |
Buffer that holds measurements prior initialization.
| bool mars::CoreLogic::core_is_initialized_ { false } |
| bool mars::CoreLogic::core_init_warn_once_ { false } |
core_is_initialized_ = true if the core state was initialized, false otherwise
| bool mars::CoreLogic::verbose_ { false } |
| bool mars::CoreLogic::verbose_out_of_order_ { false } |
Increased output of information.
| bool mars::CoreLogic::discard_ooo_prop_meas_ { false } |
Increased output of information for delayed measurements.
| bool mars::CoreLogic::add_interm_buffer_entries_ { false } |
Discard out of order propagation sensor measurements.